According to the control program stored in the computer memory, NC system performs some or all of the numerical control functions. It is equipped with a dedicated computer system with interface circuit and servo drive. It achieves the control of one or more mechanical equipment through digital commands composed of numbers, words and symbols, and it usually controls the mechanical quantities and switching quantities such as position, angle, speed and so on.
1. Introduction
According to the control program stored in the computer memory,
NC system performs some or all of the numerical control functions. It is
equipped with a dedicated computer system with interface circuit and servo
drive. It achieves the control of one or more mechanical equipment through
digital commands composed of numbers, words and symbols, and it usually
controls the mechanical quantities and switching quantities such as position,
angle, speed and so on.
2.
Technical requirements
Because
of the precise positioning of the work piece and the stacking of the work
piece, in the robot control, in addition to the vertical arm control, it also
involves servo control of the horizontal arm and the waist rotation of the
robot. During the handling process, the servo positioning operation is required
to be smooth. The running speed of the servo will determine whether the working
efficiency of the manipulator can meet the customer's application requirements.
The servo motor cannot overshoot during high-speed positioning. Overshoot will
cause oscillation and tuning too long.
3. System Construction
The
system is composed of five sets of servo drives and servo motors (the robot
transmission system uses belt transmission, and the rigidity is relatively
small). It is responsible for the loading and unloading of the machine tool, the 1, 2, 3, and
4 axes control the movements in the x and y directions, and the 5- axis
controls the movement of the z-axis horizontal pallet. The control method uses
the new-generation M2 bus system with the ZSMC iK series
driver. The iK series servo driver defaults to the M2 communication mode as
Yaskawa mode.
The
host computer is connected to the servo drive control terminal, and the control
mode is pulse + direction in position mode. The driver and related computing
boards are fixed in the electric cabinet, and the servo driver receives the
pulse command of the host computer to drive the motor to complete the
corresponding action.
4. Application
debugging of Zhishan servo
1.
Related parameter setting
|
Adapter drive and motor
|
iKAS202B driver, 110ST-M06030
|
|
parameter settings
|
X axis parameters
PA001 = 2
PA509 = 9900
PA606 = 1
PA100 = 1200
PA101 = 1500
PA102 = 800
PA401 = 8
PA409 = 492 (another PA409 is 3040)
PA410 = 50
|
Y axis parameters
PA001 = 2
PA509 = 9900
PA606 = 1
PA100 = 1200
PA101 = 1500
PA102 = 800
|
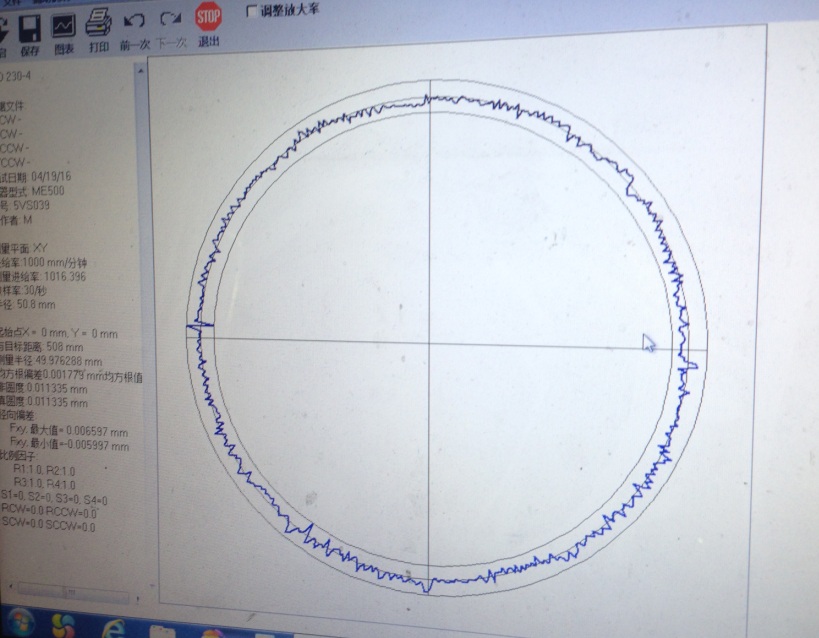
2. Running
effect
The following figure is the actual operation diagram of the CNC
machine tool, which requires drawing a circle.


 �㹫�W(w��ng)���� 33011002011190̖(h��o) ��ICP��13029913̖(h��o)
�㹫�W(w��ng)���� 33011002011190̖(h��o) ��ICP��13029913̖(h��o)